为进一步增强我院青年学生创新意识、提升创新能力、培育创新人才,10月19日下午,通信与信息工程学院在仙林校区教4-325举办第二十四届“创新杯”大学生课外学术科技作品竞赛院赛答辩会,学院党委书记徐雷,副院长赵海涛、鲍秉坤,信息与通信工程实验教学中心戴海鸿,学院电子设计竞赛资深指导老师曾桂根,109系彼得·格林贝格尔研究中心、B200105、B210123班主任袁佳磊担任本次院赛答辩评委,会议特邀校团委副书记秦昌建、集成电路科学与工程学院党委副书记、副院长乔祖琴担任嘉宾评委。本次会议由分团委书记丁杨主持。
本届“创新杯”院赛答辩共征集作品76项,500余人参与,经过严格选拔和评审,评出特等奖作品6项,一等奖作品4项,二等奖作品6项,三等奖作品9项。
本届“创新杯”正逢南京邮电大学建校80周年,为让更多学生了解科创比赛,激发科创热情,营造科创氛围,切身感受南邮学子在科技创新领域不断突破自我的精神风貌,答辩会采用线上线下相结合方式举办,全面覆盖大一大二年级学生。
希望广大学生向榜样学习、向先进学习,践行“请党放心、强国有我”的青春誓言,以聪明才智贡献国家,在青春的赛道上奋力奔跑,跑出当代青年的最好成绩!





优秀作品展示
量子智能组网
团队成员
周阳②朱佳莉③徐佳歆④马啸⑤陈子骐⑥郭明轩
指导老师:王琴 张春辉 曹原
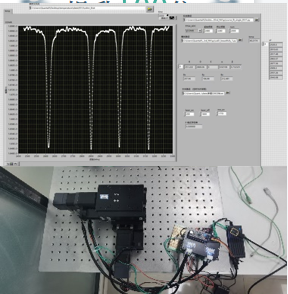
现有量子保密通信系统存在仅支持单一协议、抗干扰能力弱、系统传输效率偏低等实际问题,为此本团队研发了一套可兼容多协议的量子保密通信系统,实现在现实意义下灵活可靠的量子密钥分发。并结合人工神经网络等智能算法,实现在不稳定条件下的系统自校准和系统参数的智能寻优,提供了一套具有自动化、容错性和鲁棒性等特性智能量子组网系统;此外,首次通过考虑实际物理条件对量子密钥分发光网络的影响,提出了性价比的评估指标对资源分配进行优化。基于三种主流的量子密钥分发协议,构建了普适的虚拟业务在量子密钥分发光网络中的映射模型,实现了最优协议的推荐和虚拟业务的最佳资源分配,使其更加接近于实际应用场景。

系统实物图
多物理场高分辨测量仪
团队成员:
①卞雨辰②夏圣开③曾明菁④王明阳
⑤程子君⑥虞林嫣⑦汪晋锋⑧殷筱晗
指导老师:杜关祥
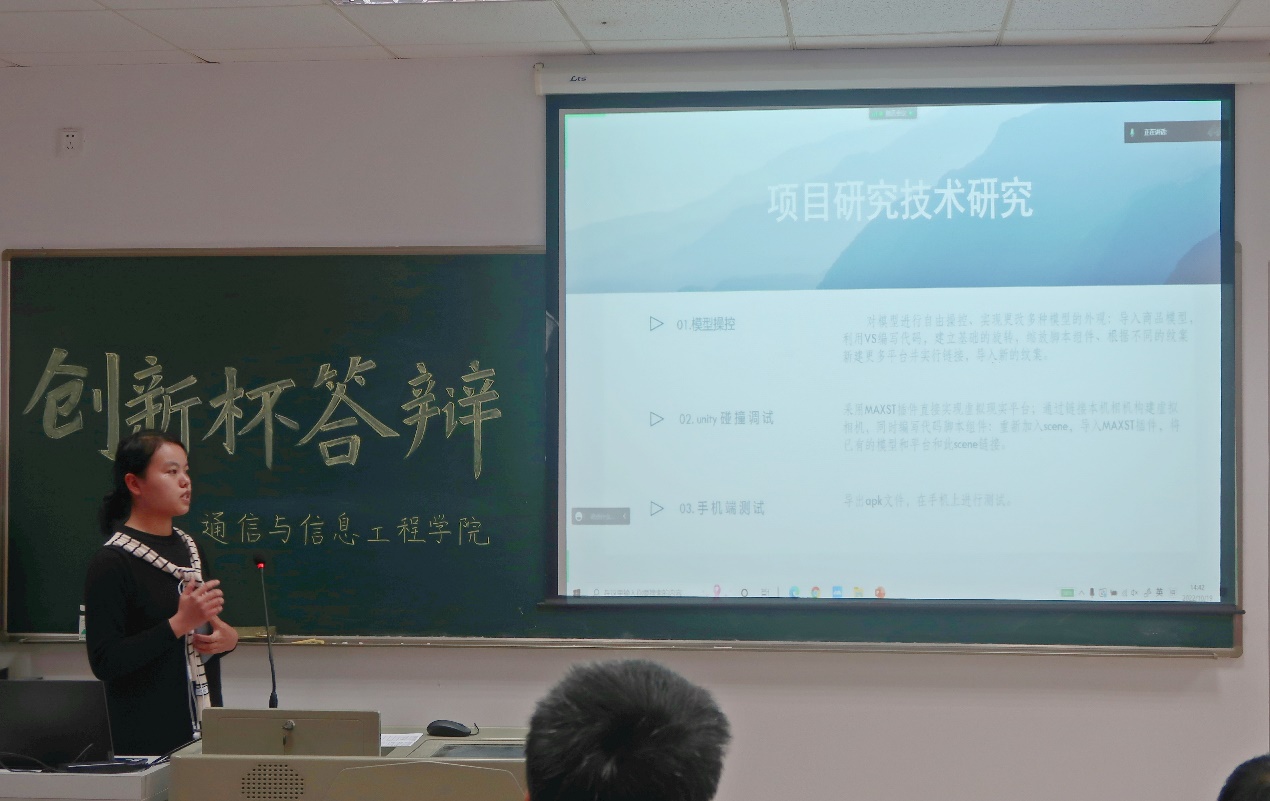
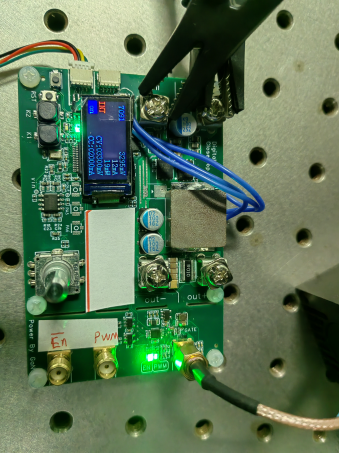
【发明目的】 后摩尔时代,精密集成设备工作频率提高、集成度提升,电磁兼容设计和测试走向晶圆级成为必然趋势。针对以上产业现状,青柚量子团队提出了多物理场高分辨测量仪,对精密集成设备的工作状态进行无损立体分析全方位立体化探测设备的工作状态,助力于精密设备的设计研发、成品测试、失效分析等关键领域。 【主要创新点】 ①将多物理量测量集成于同一设备。运用多物理场解耦算法可以同时测量探测部位微波场、温度以及矢量磁场。 ②将机器学习算法运用到量子传感器中。通过大数据分析对不同设备建立个性化模型,满足工程化需求。 ③使用FPGA进行流水线信号处理,对光学模块、位移平台等大体积设备进行自研小型化。
多物理场高分辨测量仪测试设备实物图 自研小型化位移台与激光电路 |
数据孤岛场景下的航空器个体识别与认证技术
指导老师:桂冠
团队成员:①陈思②冯紫嵚③曹寰宇④冯坚毅⑤徐相赵
作品简介:随着深度学习的发展,通信领域的专家学者们发现了深度神经网络在提取高维电磁信号的潜在特征和自适应构建分类器方面的优势,并提出了基于深度神经网络的航空器识别方法。基于深度神经网络的航空器识别方法通常假设训练数据集是集中、充分且平衡的。然而,在实际航空器辅助的物联网中,训练数据集可能是分布于物联网各个数据接收节点上的,本文称分布于各数据接收节点及其存储的数据集为数据孤岛。目前,鲜有文献讨论数据孤岛场景下的航空器个体识别与认证。基于上述分析,本项目选择ADS-B系统作为真实世界的信号源,首先开展了面向航空器辅助物联网的数据孤岛场景设想与构建,提出了基于深度残差网络的航空器个体识别与认证技术。为了实现数据孤岛场景下的航空器个体识别与认证,提出了基于分布式学习的航空器个体识别模型训练方法,为了进一步提升识别性能,还提出了基于模型堆叠的航空器个体识别模型集成技术。所提出的方法可用于数据孤岛场景下的航空器个体识别与认证,为航空器辅助的物联网提供了一种航空器安全接入解决方案。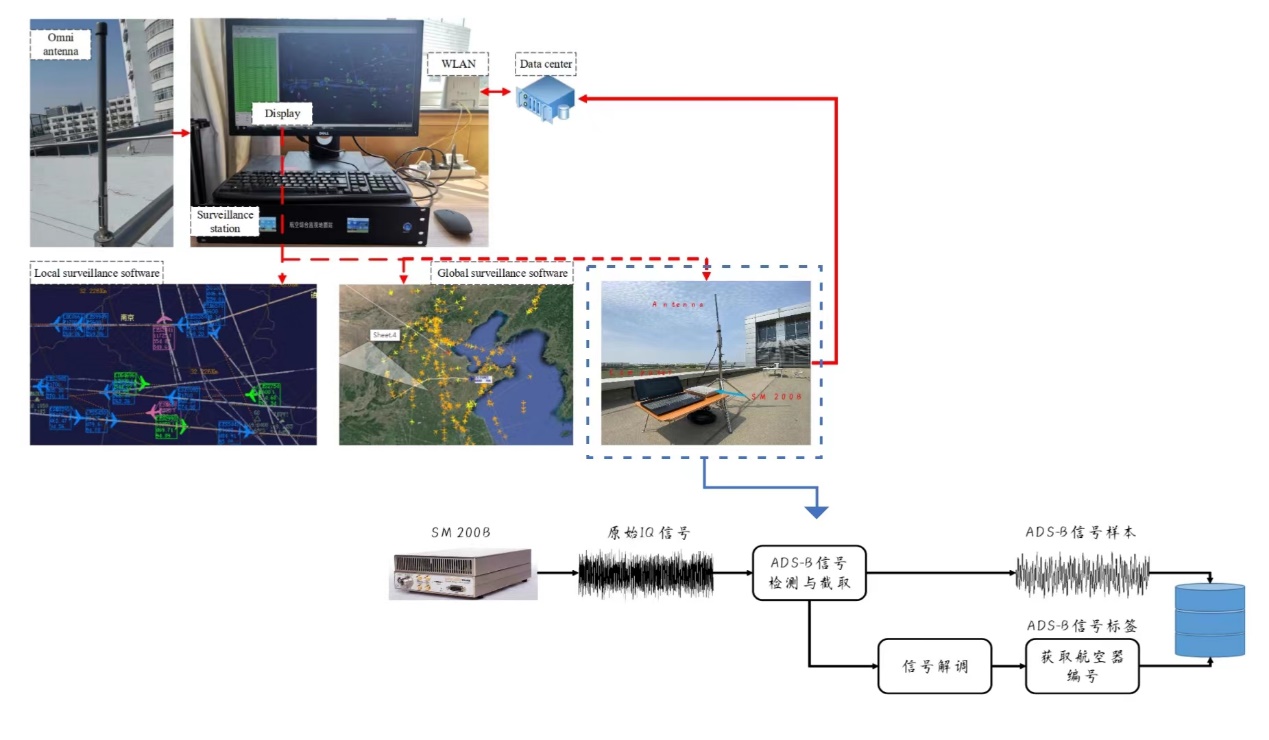 图为信号采集和系统模型
图为信号采集和系统模型
基于人工智能的智慧农林灌溉系统
指导老师:赵海涛 倪艺洋 朱春
团队成员:①陈泽超②朱铭凯③王思洋④朱桂龙⑤李琨迪⑥荀位⑦宁洛函⑧彭敏鑫
作品简介:
本项目使用了一种基于边缘机器学习的智能灌溉方法及系统,该方法首先根据绿化灌溉区域的历史数据,利用渐进梯度回归树(GBRT)训练得到蒸散量的预测模型,再根据水平衡公式计算作物需水量;最后若实时土壤湿度低于设定阈值则根据既定灌溉指令或用户的灌溉指令驱动灌溉设备直接进行灌溉,否则根据绿化需水量驱动灌溉设备进行灌溉。
本系统主要实现了数据采集、数据处理、数据可视化、时间控制、运动控制、预警六大功能。本系统的实际应用能够改变传统城市绿化灌溉方式,推广使用智慧城市绿化灌溉系统代替传统人工灌溉以及水车喷灌等方式,降低人力、物力资源消耗。相较于传统城市绿化灌溉方式,本系统有以下几点优势:1、利用无人机与机器视觉识别区域内农作物及树种的分布,将数据上传至云端利用大数据计算得出区域内灌溉喷头的最佳分布;2、实时监控,以便及时掌握灌溉区域农作物生长状况;3、智能识别绿地土壤湿度,设定阈值,根据既定灌溉指令驱动灌溉设备直接进行灌溉;4、实现灌溉数字化预测,根据预测结果按需灌溉,减少城市绿化灌溉用水量,提高水资源利用率。
乐桨派——智能划船训练监测保障系统
指导老师:郭永安、孙洪波
团队成员:①王国成②周沂③周金粮④奚城科
作品简介:近些年,赛艇和划艇等比赛项目逐渐走入大众视野,桨类运动已成为现象级水上运动,国民反响强烈。针对目前划船训练过程中测不了、评不准、练不好三大痛点问题,本项目设计了智能划船训练监测保障系统,旨在解决目前划船训练存在的数据离散、经验教学等问题。本项目产品智能划船训练监测保障系统由三部分组成:船载终端,桨载终端和划船训练监测保障系统三部分组成。该系统可实现船体数据采集、数据实时传输、高精度定位、数据存储、训练数据解析评测、并根据学员训练数据进行精准训练成绩评估和科学训练方案指导。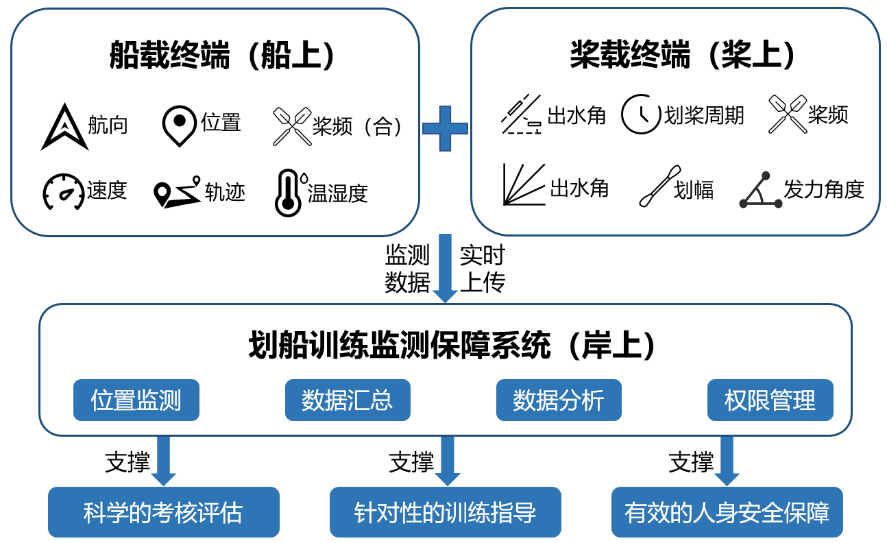 图1系统功能架构图
图1系统功能架构图
面向工业物联网的多传感器数据采集和融合系统
团队成员
张杰②张一帆,王免,刘雨露,贲翠,叶思思,陶梦圆
指导老师:孙金龙
为解决因工业物联网中生产效率的提升带来的工业数据的误处理或损坏等问题,本项目提出面向工业物联网的多传感器数据采集和融合系统,旨在提升对于工业场景下对机械信息的采集和实时监测的能力,大大弥补如今对于工业物联网的数据集匮乏的现状,实现初步的工业物联网数据采集和融合系统,在工业现场的数据采集、数据传输、数据融合,等方向构建全新的智慧数据信息平台。本项目主要包含四个方面:工业现场数据采集器的关键技术研究;数据采集器传输过程长距离不丢包、低功耗性能的研究;服务器平台的数据预处理与数据融合研究;基于工业物联网的多传感器信息采集和融合应用平台的研究,以实现多传感信息融合的方案。多传感器数据采集和融合系统架构示意图如图1所示,数据传输过程的整体原理图如图2所示。 |
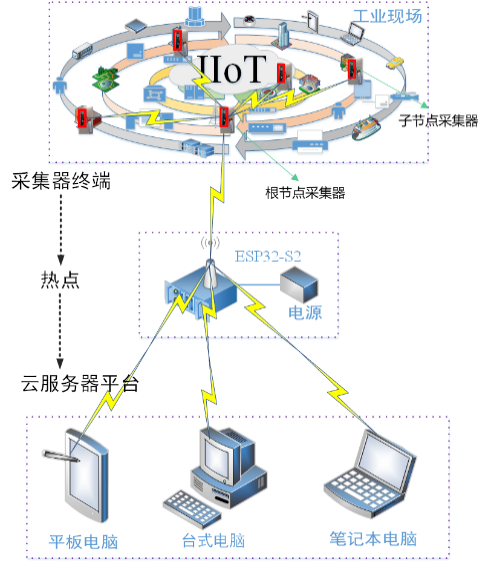
图1数据采集和融合系统架构示意图
图2 数据传输过程的整体原理图
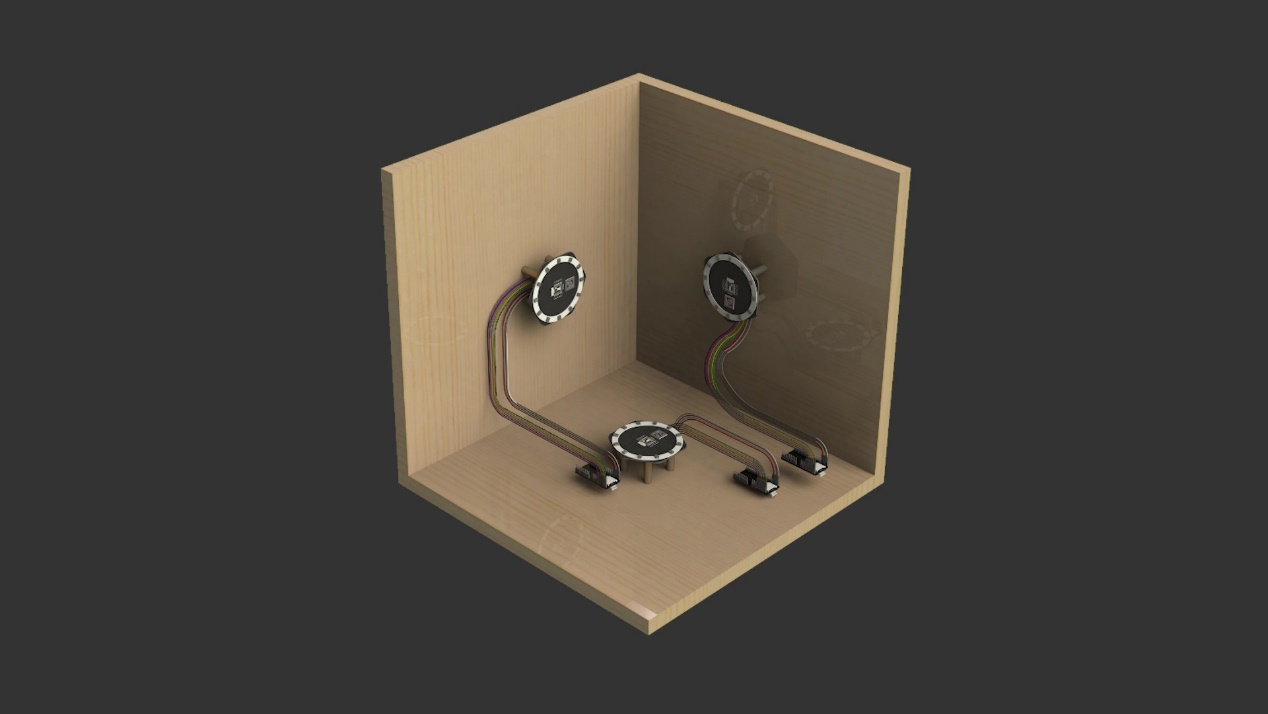
三维空间声源定位系统
指导老师:毛巍威
该实验基于三个麦克风阵列,并分别连接对应单片机开发板,利用小块木板组成小型立体装置,运用声音定位算法处理麦克风矩阵采集到的数据,精确定位发声物体在三维空间内的具体空间角,实现探究声音探测的定位原理和制作相应实验应用装置,并将数据发送至电脑端,根据各个麦克风测得的空间角,解算出最终声源的空间位置,并在坐标轴上进行可视化显示。 |
(攥稿:王玉婷 摄影:王玉婷 孙钰荃 审核:王晶 丁杨)

手机浏览

1218